- CFD, Fluid Flow, FEA, Heat/Mass Transfer
Strength of Materials
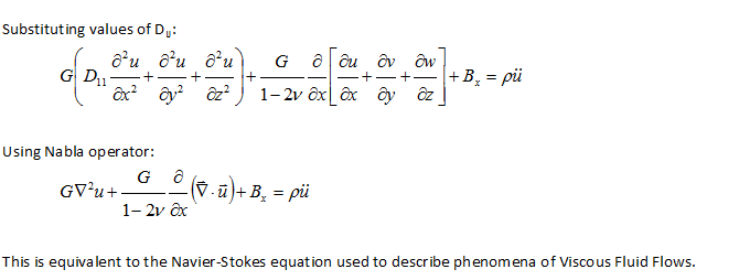
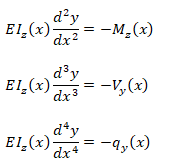
Navier-Stokes Equation for Solid Deformation
Analogy between Solid Deformation and Fluid Flow
Example solutions in solid mechanics and strength of material, equivalence of Structural and Fluid Mechanics: At the fundamental level, the governing equations of fluid mechanics ("relatively LARGER" deformation and kinematics of fluids particles) and structural mechanics ("relatively SMALLER") deformation and kinematics of solid particles) are equivalent.

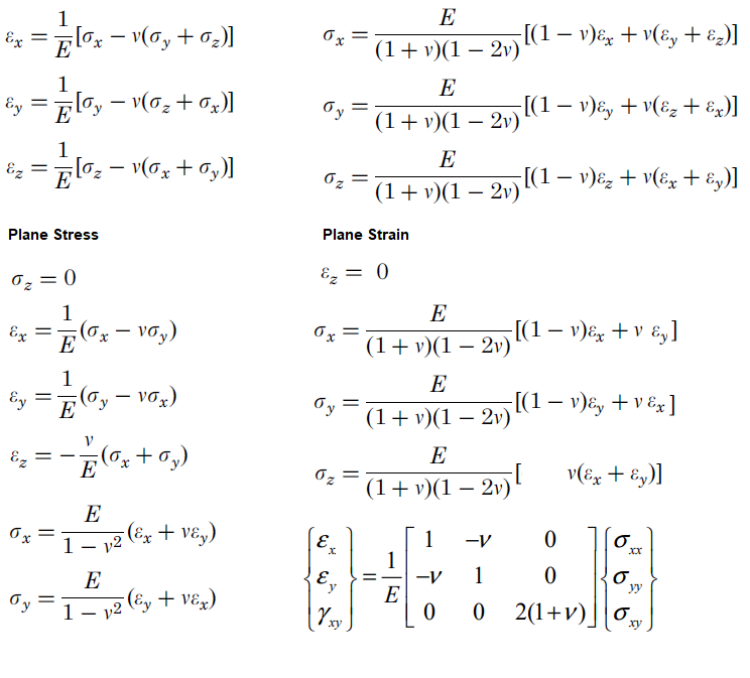
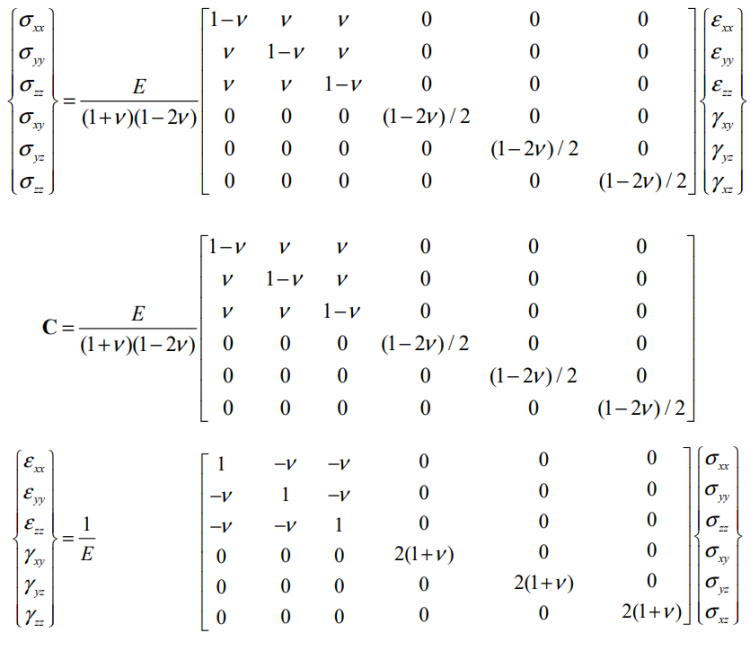
Stress-strain formula
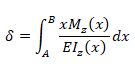
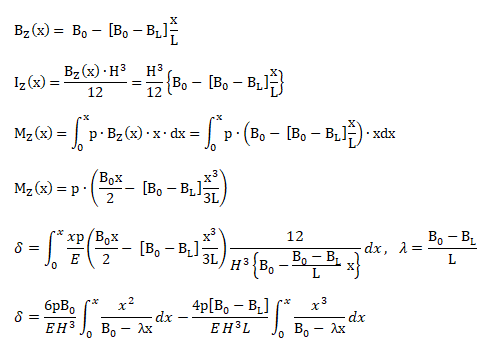
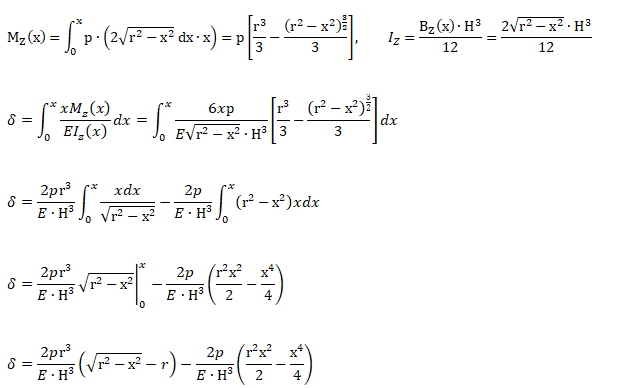
Deflection of Beams
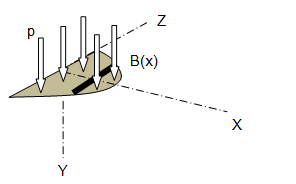
The layout of a general beam with varying cross-section is shown below.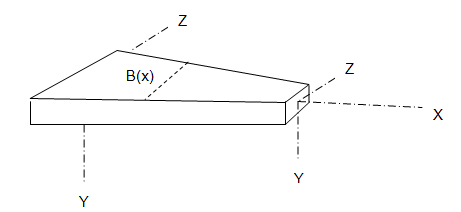
For bending of circular disk supported at one of its diameter and under uniform pressure 'p', H = thickness of the plate and symmetric half is shown below:
Bolted Joints
- Pre-load = tension in bolt (due to tightening) as net elongation of bolt which is difference of change in length of the bolt and compression of the clamped member.
- Service Load = external force acting on the clamped member.
- Bolted-joint Diagram: this is a "external force" vs. "bolt elongation" curve used to describe variation in clamping force with respect to applied force.
Mulitplication of Matrices
The mutliplication of matrices requires at least two loops and it becomes a bit complicated to chose the correct counter of indices to the arrays storing these matrices.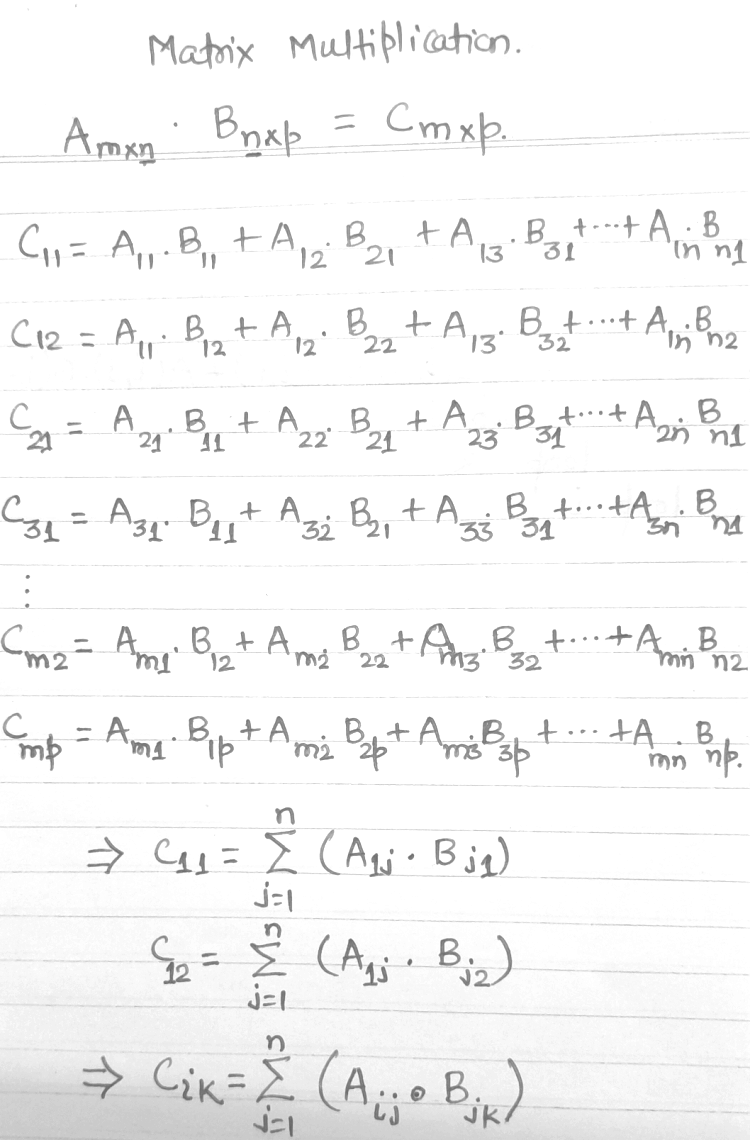
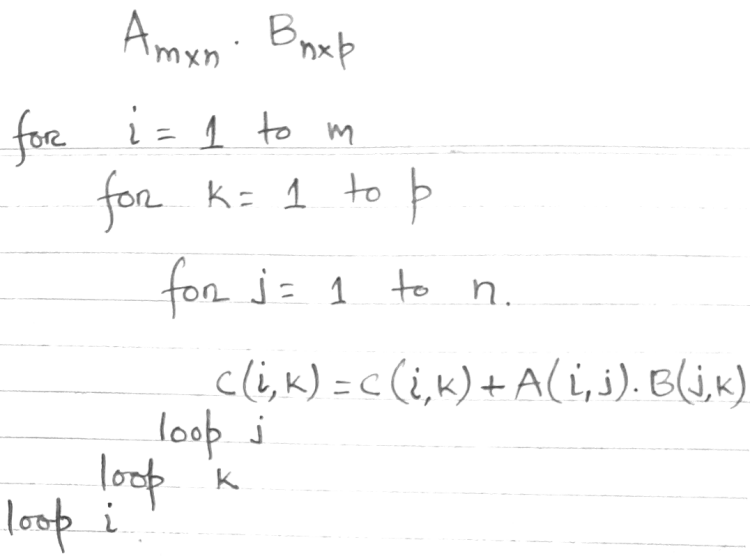
The for loop to implement the steps and index notation defined above is as follows.
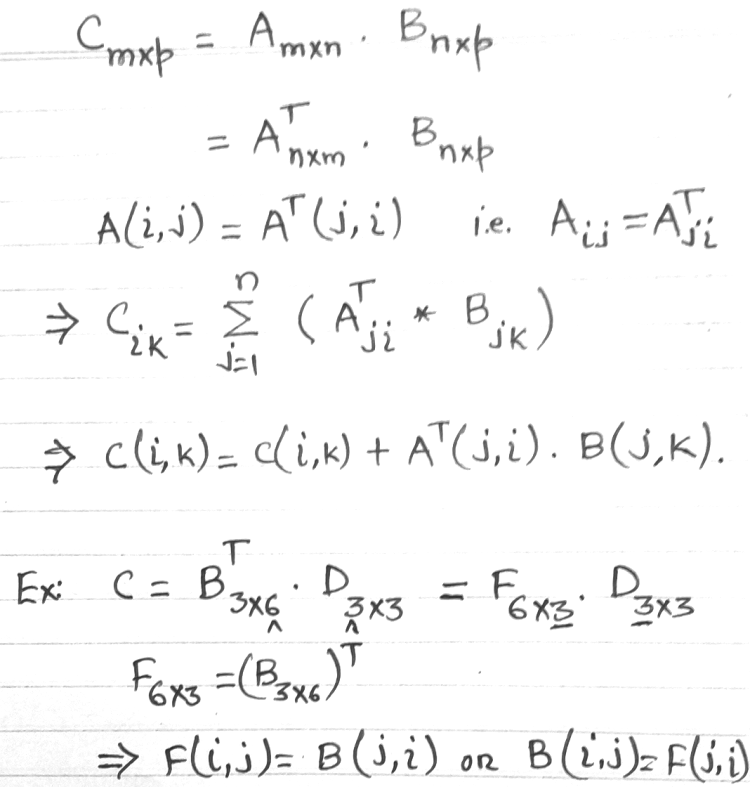
The same operation using transpose of a matrix can be implemented in a bit different manner as shown below.
The content on CFDyna.com is being constantly refined and improvised with on-the-job experience, testing, and training. Examples might be simplified to improve insight into the physics and basic understanding. Linked pages, articles, references, and examples are constantly reviewed to reduce errors, but we cannot warrant full correctness of all content.
Template by OS Templates